Quest’anno, I-RIM è lieto di annunciare due sfide tematiche, progettate per valutare l’impatto reale della ricerca all’avanguardia sviluppata dalla comunità.
I-RIM 3D presenterà due entusiasmanti competizioni tematiche: Human-Aware Navigation e Human-Robot Collaborative Manipulation. Partecipa a queste sfide per superare i confini dell’innovazione!
Date Importanti
- Scadenza sottomissione:
8 Agosto 202529 Agosto 2025 - Notifica di accettazione:
18 Agosto 20258 Settembre 2025 - Date delle challenge: 17-19 Ottobre 2025

Programma
Le Challenge si svolgeranno in tre giorni e comprenderanno la preparazione dei team, le competizioni e la valutazione finale con consegna dei premi.
Venerdì 17 e Sabato 18 Ottobre
10:00 – 19:00 – Preparazione dei team. I partecipanti avranno accesso all’area di competizione per configurare, testare e ottimizzare i propri sistemi.
Domenica 19 Ottobre
10:00 – 11:00 – Competizione Human-Aware Navigation
11:00 – 13:00 – Competizione Human-Robot Manipulation
13:00 – 13:30 – Consegna dei premi
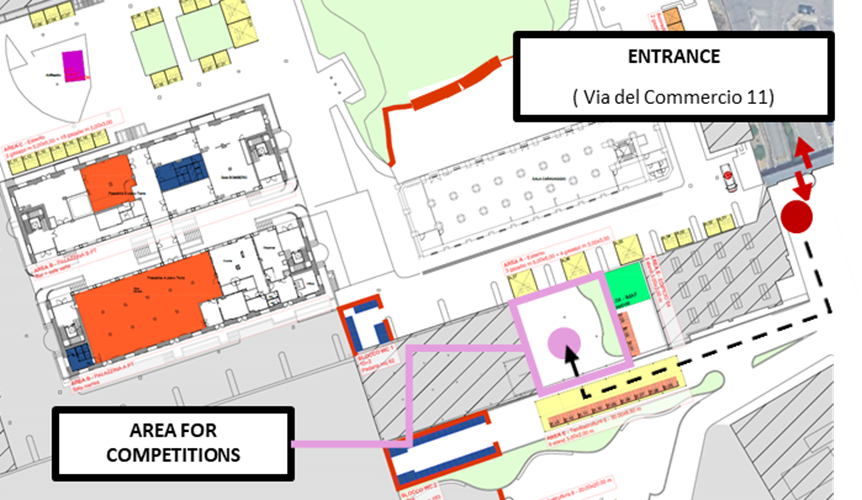
Sede
Le Challenge si svolgeranno nell’ambito della Maker Faire Rome, presso il Gazometro Ostiense.
Ingresso: Via del Commercio, 9–11 – 00154 Roma.
Le indicazioni su come raggiungere il luogo dell’evento sono disponibili nella mappa seguente
Sponsor industriali

Iscrizione
Le iscrizioni saranno accettate fino al raggiungimento del numero massimo di team (massimo 5 per ciascuna challenge). Ogni team potrà essere composto da un massimo di 6 persone. Le squadre interessate potranno registrarsi alla competizione inviando una mail agli organizzatori e indicando la challenge scelta, I nomi dei membri del team, e una descrizione di 200 parole della soluzione proposta.
Premio
Il team vincitore riceverà un premio in denaro di 500 €.
Comitato Organizzatore

1 Human – Aware Navigation Challenge
La Human-Aware Navigation Challenge è una competizione di robotica che mira a promuovere lo sviluppo di sistemi di navigazione intelligenti destinati a robot di servizio e robot industriali operanti in ambienti dinamici e popolati da persone.
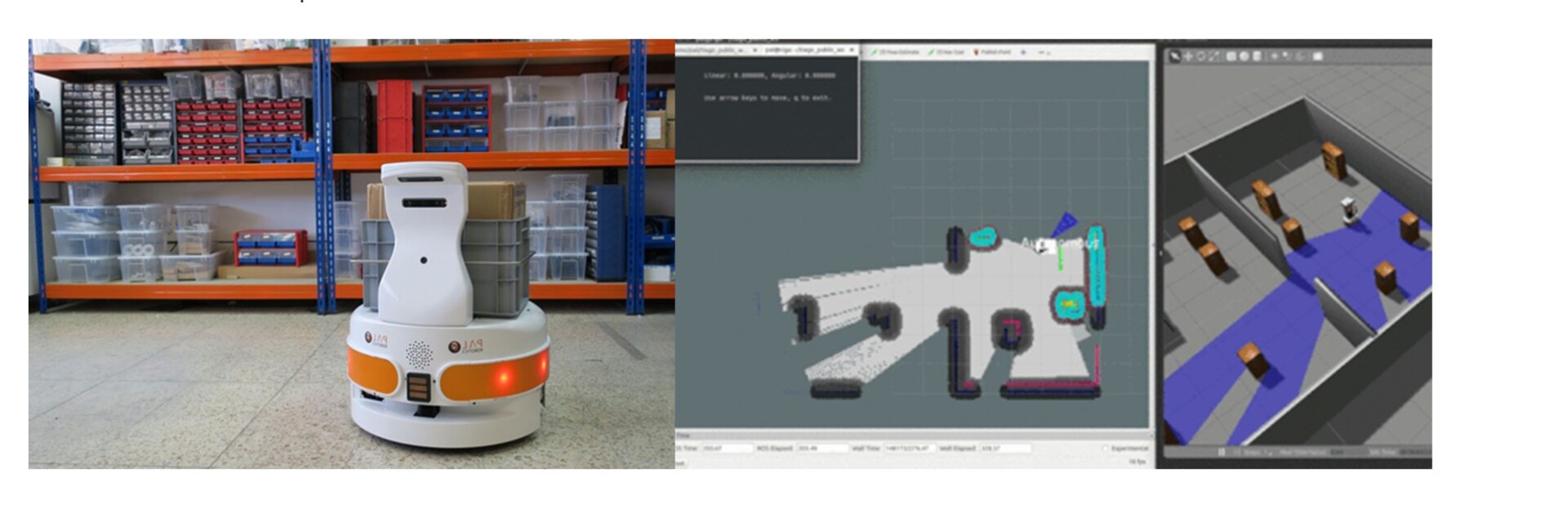
Questa challenge è supportata da PAL Robotics, che fornirà la base mobile del robot Tiago, dotata di sensori di navigazione come telecamere RGB-D, LiDAR e sensori ad ultrasuoni. La competizione è incentrata sulla progettazione di strategie di navigazione intelligenti, basate su algoritmi avanzati di percezione e pianificazione del movimento, che siano allo stesso tempo: i) capaci di gestire la presenza dell’uomo – ovvero in grado di riconoscere e adattarsi alla presenza e ai movimenti delle persone; ii) efficienti dal punto di vista energetico – minimizzando la lunghezza del percorso, il consumo di energia e la durata del tragitto. L’obiettivo finale è consentire ai robot di muoversi in modo fluido e sicuro verso obiettivi assegnati, anche in ambienti dinamici e imprevedibili.
Descrizione
Ai partecipanti è richiesto di sviluppare algoritmi avanzati di percezione e pianificazione del movimento che consentano al robot Tiago di navigare verso una sequenza di posizioni target all’interno di un ambiente indoor popolato da agenti umani in movimento. La sfida pone particolare enfasi sull’integrazione di due moduli fondamentali:
- Modellazione avanzata dell’ambiente: Utilizzando sensori integrati, come telecamere RGB-D, LiDAR e sensori a ultrasuoni, il robot deve essere in grado di costruire una rappresentazione dettagliata dell’ambiente. Questo include: la mappatura di pareti, ostacoli statici e oggetti mobili; il tracciamento dinamico delle persone in movimento. Il sistema dovrà aggiornare continuamente il proprio modello interno per riflettere i cambiamenti nell’ambiente e anticipare possibili interazioni.
- Pianificazione del movimento: Una volta definito un obiettivo specifico, il robot dovrà essere in grado di raggiungerlo minimizzando il costo energetico del percorso, scegliendo traiettorie quanto più brevi e fluide possibile, evitando accelerazioni inutili o deviazioni non necessarie. Inoltre, dovrà prevedere la presenza umana e adattare di conseguenza il proprio movimento per garantire la sicurezza delle persone (ad esempio evitando arresti bruschi). Il pianificatore dovrebbe essere pensato per anticipare il movimento umano. Il sistema, pur preservando la sicurezza e ottimizzando l’energia, dovrà anche ridurre al minimo il tempo necessario per raggiungere ogni obiettivo.
I partecipanti avranno accesso a un ambiente di simulazione Gazebo e a un workspace compatibile con ROS1. Le soluzioni sviluppate verranno successivamente testate su un robot Tiago reale durante la fase finale della competizione. Sarà reso disponibile un codice di riferimento tramite GitHub, contenente: i) scenari di simulazione, ii) modelli di agenti umani, e iii) strutture iniziali per la pianificazione del movimento.
Regolamento
- L’ambiente di gara simulerà uno scenario indoor con ostacoli statici (ad esempio, pareti e/o arredi) e agenti umani dinamici con schemi di movimento predefiniti.
- Al robot verrà assegnato il compito di raggiungere una serie di posizioni target entro un tempo limite.
- Il robot dovrà:
- Evitare collisioni con esseri umani e ostacoli;
- Selezionare percorsi energeticamente efficienti, minimizzando sia la durata del tragitto sia la lunghezza del percorso;
- Raggiungere gli obiettivi desiderati nel minor tempo possibile, bilanciando i vincoli di efficienza energetica e sicurezza.
Le regole della competizione possono essere soggette a modifiche o integrazioni. Per aggiornamenti si invita a consultare il repository GitHub.
Software/Code Availability
L’ambiente di simulazione, in cui ogni team potrà addestrare e testare le soluzioni sviluppate, insieme al codice di base per il robot Tiago, sarà disponibile dopo la registrazione alla challenge al link indicato. Le istruzioni per la configurazione saranno fornite all’interno del pacchetto di simulazione. Si consiglia di consultare il file di “readme” per la descrizione dei pacchetti ROS forniti.
L’ambiente di simulazione includerà:
- Una simulazione su Gazebo con il robot Tiago e lo scenario operativo;
- Pacchetti di base compatibili con ROS Noetic;
- Modelli 3D degli oggetti e dell’ambiente;
- Istruzioni dettagliate per la configurazione e il testing.
Ogni team sarà responsabile dello sviluppo dei propri moduli per:
- La mappatura di pareti e oggetti statici
- La rilevazione degli esseri umani
- La pianificazione del movimento e la prevenzione delle collisioni
AI gruppi è concesso utilizzare codici open-source come base di partenza per lo sviluppo dei propri moduli.
Valutazione e penalità
Ogni team avrà a disposizione due tentativi, ciascuno con una durata massima (ad esempio, 5–10 minuti).
Il punteggio finale sarà calcolato in base a:
- Numero di obiettivi raggiunti
- Tempo totale impiegato per raggiungere tutti gli obiettivi
- Consumo energetico, stimato a partire dalla lunghezza della traiettoria e dal profilo di velocità
Saranno applicate penalità in caso di:
- Collisioni con persone o ostacoli statici
- Deviazioni eccessive o percorsi inefficienti
- Cambiamenti innaturali o bruschi nella velocità o nella direzione
Punti bonus potranno essere assegnati per:
- L’approccio di pianificazione del movimento più innovativo
- La performance più affidabile tra i vari tentativi
Il punteggio finale sarà calcolato come la somma dei punti per il numero di obiettivi raggiunti, meno eventuali penalità, più eventuali bonus. In caso di parità, farà fede il risultato del secondo tentativo come criterio di spareggio.
Q&A e supporto
Sessioni di Q&A bisettimanali saranno organizzate dagli organizzatori (tramite Microsoft Teams) per: i) Fornire supporto ai partecipanti; ii) Chiarire i regolamenti; iii) Aggiornare il codice di base.
Per ulteriori informazioni, è possibile contattare:
- Dott. Clemente Lauretti (c.lauretti@unicampus.it)
- Dott. Andrea Pupa (andrea.pupa@unimore.it)
- Dott. Simone Leone (simone.leone@unical.it)
- Prof. Fabio Ruggiero (fabio.ruggiero@unina.it)
- Dott. Domenico Chiaradia (domenico.chiaradia@santannapisa.it)
2 Human – Robot Collaborative Manipulation Challenge
La Human-Robot Collaborative Manipulation Challenge è una competizione di robotica focalizzata sullo sviluppo di algoritmi avanzati di percezione e pianificazione del movimento per la manipolazione collaborativa in contesti industriali.
La sfida è supportata da PAL Robotics, che metterà a disposizione il robot Tiago, provvisto di: i) un braccio robotico a 7 gradi di libertà, ii) una pinza parallela, e iii) sensori avanzati per la percezione dell’ambiente, come ad esempio una telecamera RGB-D.
Questa sfida si propone di progettare strategie intelligenti di manipolazione che consentano ai robot di operare in modo sicuro, efficiente ed efficace in spazi di lavoro condivisi con operatori umani.
L’obiettivo finale è permettere al robot di eseguire compiti di manipolazione in coordinamento con operatori umani, garantendo: i) una cooperazione fluida, ii) l’evitamento delle collisioni, e iii) la minima interferenza possibile con le attività svolte dagli esseri umani.

Descrizione
I partecipanti dovranno sviluppare algoritmi che consentano al robot Tiago di eseguire compiti di manipolazione collaborativa all’interno di un ambiente di lavoro condiviso con un operatore umano. Il robot sarà incaricato di manipolare oggetti (ad es. prendere e posizionare componenti, oppure passare strumenti) in coordinamento con le azioni dell’operatore umano.
La sfida pone enfasi su due aspetti fondamentali:
- Modellazione avanzata dell’ambiente: utilizzando una telecamera RGB-D, il robot deve essere in grado di costruire una rappresentazione dettagliata e aggiornata dell’ambiente. Questo comprende:
-
- il rilevamento e la localizzazione degli oggetti da manipolare,
- la capacità di identificare ed evitare ostacoli,
- il tracciamento dinamico dei movimenti dell’operatore umano durante l’esecuzione dei compiti.
- Cooperazione uomo-robot: attraverso tecniche avanzate di pianificazione del movimento e strategie di controllo, il robot dovrà interagire con l’operatore umano in modo sicuro ed efficace. Lo scenario della sfida rifletterà situazioni industriali realistiche, come operazioni di assemblaggio e smontaggio, e richiederà soluzioni robuste, ripetibili e sicure. In particolare, il robot dovrà:
-
- prelevare strumenti da contenitori e passarli all’operatore umano durante attività di assemblaggio;
- ricevere strumenti dall’umano e riporli nei contenitori appropriati, comportandosi quindi come un assistente proattivo all’interno del flusso di lavoro.
Ai partecipanti sarà fornito un ambiente di simulazione Gazebo e compatibile con ROS1, che includerà:
-
- riproduzioni di banchi da lavoro industriali,
- strumenti condivisi,
- avatar umani che eseguono azioni predefinite.
La fase finale della competizione prevede il test delle soluzioni sviluppate sul robot Tiago reale. Una repository contenente scene di simulazione e scenari di esempio sarà pubblicata su GitHub.
Regolamento
Durante l’esecuzione dei compiti, il robot dovrà:
- Rilevare e localizzare strumenti e oggetti presenti nell’ambiente di lavoro;
- Tracciare dinamicamente la mano dell’operatore umano e adattare il proprio comportamento di conseguenza, specialmente per le attività di passaggio di utensili;
- Pianificare ed eseguire azioni di manipolazione — ad es. prendere strumenti da contenitori, consegnarli all’operatore, riceverli e riporli nei contenitori designati —
- il tutto senza interrompere il flusso di lavoro umano, garantendo la sicurezza e evitando collisioni con la persona o l’ambiente;
- Controllare la pinza e il braccio del robot per manipolare gli oggetti in modo sicuro e limitare i movimenti non necessari.
Saranno proposti diversi scenari che prevedono il passaggio di utensili tra robot e operatore e viceversa. Ogni scenario sarà strutturato con: i) condizioni iniziali chiare, ii) obiettivi ben definiti, e una durata di tempo specifico.
Le regole della competizione possono essere soggette a modifiche o integrazioni.
Per aggiornamenti si invita a consultare il repository GitHub.
Software/Code Availability
L’ambiente di simulazione, in cui ciascun team potrà addestrare e testare le soluzioni sviluppate, insieme al codice di base per il robot Tiago, sarà disponibile dopo la registrazione alla challenge al link indicato.
Le istruzioni per la configurazione saranno fornite all’interno del pacchetto di simulazione.
Si invita a consultare il file “readme” per la descrizione dei pacchetti ROS forniti.
L’ambiente di simulazione comprenderà:
- Una simulazione Gazebo con il robot Tiago e lo scenario di lavoro;
- Pacchetti di base compatibili con ROS Noetic;
- Modelli 3D degli oggetti e dell’ambiente;
- Istruzioni dettagliate per l’installazione e il test.
Ogni team sarà responsabile dello sviluppo dei propri moduli per:
- Rilevamento e riconoscimento degli oggetti
- Tracciamento dello scheletro umano
- Pianificazione della presa e del movimento del braccio
- Controllo della pinza e posizionamento degli oggetti
Ai gruppi sarà permesso utilizzare codici open-source come base di partenza per lo sviluppo dei propri moduli.
.
Valutazione e penalità
Ogni team avrà due tentativi ufficiali, ciascuno con una durata massima (ad esempio 5–10 minuti, a seconda della complessità dello scenario).
Il punteggio finale sarà calcolato in base a:
- Il numero di azioni di manipolazione completate (ad esempio: strumento passato correttamente o riposto nel contenitore corretto).
- La difficoltà nel manipolare gli oggetti (ad esempio: oggetti piccoli, riflettenti o parzialmente occlusi daranno punteggi più alti).
Saranno applicate penalità nei seguenti casi:
- Collisioni con l’operatore umano o con l’ambiente.
- Tentativi di passaggio dello strumento mancati o ripetuti.
- Selezione errata degli oggetti.
- Oggetti danneggiati o fatti cadere.
Punti bonus potranno essere assegnati per:
- L’approccio cooperativo più innovativo.
- La performance più affidabile nei vari tentativi.
Il punteggio finale sarà determinato come somma dei punti per le azioni completate meno le penalità, più eventuali punti bonus. In caso di parità, sarà considerato come criterio di spareggio il risultato del secondo tentativo.
Q&A e supporto
Sessioni di Q&A bisettimanali saranno organizzate dagli organizzatori (tramite Microsoft Teams) per: i) Fornire supporto ai partecipanti; ii) Chiarire i regolamenti; iii) Aggiornare il codice di base.
Per ulteriori informazioni, è possibile contattare:
- Dott. Clemente Lauretti (c.lauretti@unicampus.it)
- Dott. Andrea Pupa (andrea.pupa@unimore.it)
- Dott. Simone Leone (simone.leone@unical.it)
- Prof. Fabio Ruggiero (fabio.ruggiero@unina.it)
- Dott. Domenico Chiaradia (domenico.chiaradia@santannapisa.it)